Il Web contiene un’ampia quantità di informazioni sui microcontrollori e sulla famiglia PIC in particolare. Accanto ai siti dei produttori hardware e software (in testa a tutti www.microchip.com) esiste un gran numero di siti semiprofessionali e amatoriali dove vengono presentati corsi per principianti, esempi applicativi svolti con schemi elettrici, consigli, esperienze personali a livelli quanto mai vari.
In un Istituto Professionale o Industriale la trattazione e l’uso dei microcontrollori è ormai un argomento standard; compare nei libri di testo e nelle riviste tecniche; non si può cominciare a parlare di autronica, di domotica, in generale di controllistica senza tirare in ballo il microcontrollore.
Quello che segue non è un corso sul PIC, nè una esauriente trattazione. E’ un insieme di indicazioni come possono essere date a lezione in una classe quarta IPSIA; è uno spunto per cominciare a discutere con gli studenti. E’ un approccio semplificato puramente didattico.
La forma del testo è quello di Word, ma si può pensare di trasferire il testo in PowerPoint: così l’esposizione risulta più gradevole con l’uso di adatti strumenti grafici. Usando una presentazione si perde senz’altro in completezza, perchè le slide di PowerPoint troppo cariche di testo e figure sono difficilmente digeribili; si acquista in agilità, se gli studenti sono disposti ad usare le slide come inizio di un lavoro (non come sunto da sunteggiare ancora finché non resta più niente!).
Questo materiale è fornito anche come file.PPT da scaricare (zip 297 kb) per libero uso.
|
Il microcontrollore
|
|
Il µP contiene:
|
|
Il µP ha bisogno per funzionare:
|
|
Il µC invece possiede su un unico chip:
|
Contiene cioè, sia quello che possiede un µP (anche se in quantità molto ridotta), sia parti che il µP non possiede.
Inoltre ha ingombro minimo e richiede poca potenza di alimentazione
|
RISC significa: Le istruzioni perciò:
non serve un clock molto elevato per un efficiente funzionamento (dai 4-8 MHz per i tipi più semplici, fino a 33-50 MHz per i tipi più evoluti) |
|
Il microcontrollore che si vuole usare qui è il PIC16F84 della Microchip Technology PIC = Peripheral Interface Controller (Controllore di periferiche programmabile) La sua caratteristica più importante sta nella sigla F: Il programma risiede in una EEPROM FLASH (Electrically Erasable Programmable Read only Memory) è modificabile immediatamente anche senza togliere l’integrato dal circuito (modalità: in-circuit) |
|
Schema sintetico del PIC
|
|
Alcune sezioni del µC
|
|
Il PIC16F84 Caratteristiche:
|
|
Altre caratteristiche:
|
Due punti di forza del microcontrollore sono:
- l’abbondanza di registri
- la presenza di porte di Ingresso/Uscita capaci di pilotare carichi esterni
Quindi occorre saper gestire bene registri e porte.
I registri sono celle, locazioni, di memoria dove il µC legge e scrive valori fondamentali per il funzionamento. Sono celle che hanno un indirizzo esadecimale (h) ; si dice che sono mappati in memoria.
Ad esempio scrivendo o leggendo nelle locazioni 05h e 06h si scrive o si legge nelle porte A e B.
Se si programma il PIC in linguaggio macchina (Assembler) occorre precisare molti dettagli per i registri, con istruzioni da mettere all’inizio del programma.
Se si usa un linguaggio ad alto livello (Basic), le istruzioni da aggiungere sono minori. Tuttavia la mappa di memoria (cioè l’allocazione dei registri) deve sempre essere conosciuta.
La gestione delle porte A e B di IN/OUT
E’ fondamentale saper programmare le porte di ingresso/uscita.
Ognuno dei pin della porta A (05h) può essere impostato in modo indipendente come ingresso o come uscita in base al contenuto del registro di controllo TRISA (85h): impostando a 1 il bit di TRISA la porta corrispondente è un ingresso (se è 0 diventa uscita). Lo stesso vale per la porta B (06h) gestita da TRISB (86h).
Esempio: con TRISB = 00111111, RB6 e RB7 sono linee di uscita (possono comandare un carico), e le altre linee sono ingressi (possono accettare un segnale esterno).
|
|
Pin function - OSC1/CLKIN: oscillator crystal input - OSC2/CLKOUT: oscillator crystal output - MCLR: master clear (reset) - RA0 ..RA4: 5 linee porta A - RB0 .. RB7: 8 linee porta B - Vss: massa - Vdd: alimentazione positiva |

Oscillatore a quarzo per il clock
L’oscillatore del PIC può funzionare in quattro modi:
- LP Low Power Crystal 32 KHz .. 200 KHz
- XT Crystal/Resonator 100 KHz .. 4 MHz
- HS High Speed Crystal/Resonator 8 MHz .. 20 MHz
- RC Resistor Capacitor
Si può usare un quarzo o un risonatore ceramico, a varie frequenze, oppure un circuito RC con scarsa precisione in frequenza.
Occorre scegliere un modo, sia per costruire il circuito, sia per impostare le opzioni del dispositivo programmatore: l’opzione più comune è XT.
Il software per il PIC - 1° modo
Il programma per il PIC si può scrivere in linguaggio assembly o assembler, usando direttamente le 35 istruzioni riconosciute dal PIC.
Il programma si scrive come un file di testo. Esso viene convertito in codice binario da un programma chiamato Assemblatore. Il file creato contiene codici esadecimali e ha estensione. HEX
Per trasferire poi il file HEX nella memoria di programma del PIC occorre un dispositivo chiamato Programmatore.
Si usa un Personal Computer:
- per scrivere il testo del programma,con un editor di testi (non Word !)
- per convertirlo in codice eseguibile, usando l’Assemblatore
- per scriverlo nel PIC, usando un Programmatore.
La casa costruttrice Microchip fornisce un pacchetto integrato chiamato MPLAB. Esso comprende:
- MPLAB Editor: editor di testo per scrivere il testo del programma
- MPASM: il compilatore che traduce il testo in codice eseguibile (usando il codice esadecimale)
Il compilatore MPASM è liberamente usabile. Si scarica dal sito della Microchip e si può usare indipendentemente dall’editor.
Lavorando in Assembler, la parte più difficile è il debug, cioè l’eliminazione degli errori di programmazione. Esistono software di simulazione, a pagamento in genere, che consentono di controllare il funzionamento del programma
Programmazione fisica del PIC
La famiglia PIC16F8X, che comprende il 16F84, il 16F877 ecc., può essere programmata:
- separatamente, con un Programmatore (programmazione out of circuit)
- direttamente, mentre si trova già montato nel circuito finale, aggiungendo nello schema del progetto un adatto connettore in più (programmazione in-circuit)
Dato che il PIC ha una memoria Flash di programma, sono possibili veloci variazioni o aggiornamenti del codice programma.
Sistema di programmazione out of circuit.
Dopo aver scritto il programma, cioè il codice sorgente, lo si compila con il MPASM: viene creato un file oggetto con estensione.HEX, il quale deve essere caricato nella memoria di programma del PIC, inserito in uno zoccolo del programmatore
Per caricare il file.HEX nella memoria programma del PIC occorre:
- Un personal computer
- Un programmatore
- Il software di gestione del programmatore
Il PC: tramite un semplice software di gestione, legge il file.HEX; riconosce l’area di memoria del PIC dove scaricarlo
Il programmatore: Imposta la tensione di scrittura (+13V) e adatta il segnale in arrivo ai circuiti interni del PIC
Il PC: Trasferisce i dati nel PIC attraverso il collegamento seriale/parallelo. Dopo la scrittura fatta dal programmatore, verifica i dati scritti
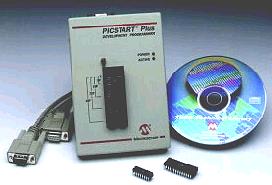
Programmatore industriale
Un insieme completo e di livello professionale è il PICSTART Plus fornito dalla stessa casa costruttrice Microchip Inc.
Svantaggio: alto costo
Vantaggio: è aggiornabile agli ultimi modelli Microchip
Esistono molti programmatori industriali di terze parti, a costo minore, o di tipo hobbystico, già pronti o in kit da costruire.
In genere se sono di basso costo, programmano solo alcuni tipi di PIC e non sono aggiornabili agli ultimi modelli.
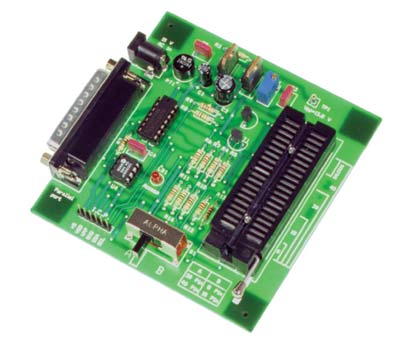
Programmatore di PIC in scatola di montaggio - FT386
Si collega alla porta parallela del PC.
Ha uno zoccolo ZIF (Zero Insertion Force) a 40 pin e accetta diversi tipi di PIC.
Ha costo limitato
Funziona col software free EPIC, il quale legge dal PC il file.HEX creato con l’assemblatore, e lo scrive nella Flash EEPROM
Programmatore a più zoccoli
Data la varietà di PIC esistenti, il programmatore può anche comprendere diversi zoccoli (a 8 pin, 18 pin, 40 pin), che sono meno costosi ma meno comodi dello zoccolo ZIF
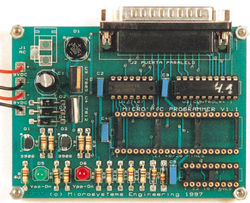
Tipi di PIC da 8 pin a 40 pin
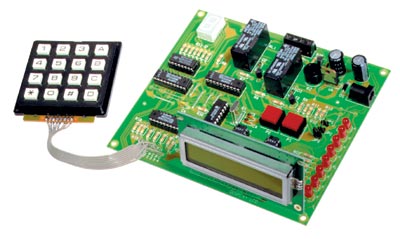
Demoboard
Dopo aver programmato il PIC, si può usare una scheda di valutazione o dimostrativa per controllare l’esattezza del programma.
Una demoboard contiene alcuni semplici dispositivi di ingresso (pulsanti ad esempio) e di uscita (led, relè) e si usa in genere per apprendere i fondamenti della programmazione. Esistono demoboard molto sofisticate e costose (con sensori di temperatura, interfacce di vario tipo, display alfanumerici e grafici) e altre di costo limitato. Dato che la frequenza di clock è di pochi MHz, i circuiti con PIC si possono montare, con qualche precauzione, anche su breadboard millefori senza saldatura.
La demoboard FT215-K in scatola di montaggio contiene:
- 8 led
- 1 display LCD
- 1 tastiera a matrice
- 1 display a 7 segmenti,
- 2 pulsanti,
- 2 relè,
- 1 cicalino piezo
tutti controllabili dal PIC per verificare immediatamente il programma appena memorizzato
La PROTON BOARD contiene interfacce e anche una breadboard per piccoli montaggi senza saldature
Questi sono alcuni siti dove trovare compilatori in Basic per il PIC, sia a pagamento, sia in versione demo, con limitazioni.
http://www.picbasic.co.uk
http://www.crownhill.co.uk
http://www.picbasic.it
http://www.melabs.com
http://www.letbasic.com
http://www.microengineeringlabs.com
Nel sito http://www.picbasic.org è presente l’ultima versione del software di programmazione, che sostituisce tutti i precedenti presentati negli anni passati nel sito, perché ha una caratteristica innovativa.
L’ambiente integrato PROTON DS
Proton Development Suite
Il sistema più aggiornato disponibile oggi è un ambiente dove è presente:
- Un compilatore basic Proton+
- Un collegamento verso un Programmatore
- Un ambiente di simulazione basato su una Virtual Evaluation Board
- Il compilatore (Proton + Compiler versione 2.1.3 della ditta Crownhill) consente di scrivere programmi in Basic e di tradurli in file.HEX, usando il MPASM della Microchip.
- Il Programmatore di default può essere sostituito da uno a piacere.
- La board virtuale permette la simulazione a video del circuito: comprende il PIC e alcune periferiche simulate:
- Temperature sensor
- PortB Monitor
- Alphanumeric LCD display
- 128x64 graphic LCD display
- Serial terminal 9600 Baud
- Serial eeprom
- 16 button Keypad
- Oscilloscope
- Variable resistor
Uso della Virtual Board
Dopo aver scritto il programma Basic, il comando Compile and Program ha un menù dove si può:
- inviare il codice creato al Programmatore di default
- installare un nuovo Programmatore (ad esempio EPIC)
- inviare il codice al Labcenter Electronics PROTEUS, ossia ad una delle possibili Virtual Board.
Ognuno dei PIC supportati ha una diversa Virtual Board:
Questa è una parte della Virtual Board per il PIC16F628A (PIC16_18PIN) . E’ presente un PORTB Monitor con il quale è possibile verificare la correttezza di sequenze programmate di azionamenti di carichi (led o relè) collegati sulla porta B.
Questa è invece una parte della Virtual Board per PIC16F877 (PIC16_ALCD), comprendente tra l’altro un display alfanumerico, un tastierino numerico, dei carichi, un oscilloscopio per visualizzare forme d’onda.
La suite intera ha un costo significativo.
Esiste anche una versione LITE di libero uso, scaricabile dal sito, con importanti limitazioni, che non impediscono però un uso didattico efficace:
- Programmi Basic con massimo 50 linee di codice
- La virtual board non è collegabile a piacere
- Sono supportati solo 4 tipi di PIC:
- 12C508 (8 pin .. 12 bit)
- 12F675 (8 pin .. 14 bit)
- 16F628A (18 pin .. 14 bit) (sostituisce il 16F84)
- 16F877 (40 pin .. 14 bit)
Dato che non è più supportato il classico 16F84, occorre un programmatore adatto.